V minulém dílu našeho seriálu o problematice práce s digitálními PLM daty v průmyslové praxi jsme si ukázali cestu od vytvoření prvotních koncepcí a konstrukčních studií až po výrobu prototypu s využitím FDM tisku. Dnes se podíváme blíže na integraci modelu s některými kritickými konstrukčními uzly jako je pohon, mikropočítač a další elektronika.
Ukážeme si také jak může být digitální prototyp skvělým pomocníkem prakticky ve všech fázích návrhu nového výrobku a na našem školním automobilu si předvedeme některé z možností nasazení adaptivního modelování.
Pohon modelu a jeho optimalizace
Nezbytným krokem v konstrukci našeho modelu automobilu je návrh jeho pohonu. Zde se jednalo o poměrně snadný krok vzhledem k naším zkušenostem využití elektropohonu v modelech letadel. Původní převodovka s plně tištěným ozubením se ukázala jako dobře funkční, ale příliš hlučná a nevhodná pro vyšší výkony nad 150 W. Proto byl připraven zcela nový pohonný systém, který se skládal z kombinace malé převodovky s kovovými převody a s koncovým stupněm skládajícím z tištěného kuželového ozubení. Původní stejnosměrný motor byl nahrazen střídavým elektromotorem s výkonem přibližně 350 W a 40 A střídavým regulátorem s možností reverzace chodu.
")
Druhá verze pohonu se střídavým elektromotorem pro vyšší výkony nad 150 W
Modul ozubení výstupního převodu byl s ohledem na jeho výrobu a životnost zvětšen o 50 %. Životnost převodu z FDM tiskárny budeme muset vyzkoušet experimentálně. Existuje několik málo nadšeneckých studií na toto téma, ale životnost bude obecně nižší než u klasických převodů vyráběných například vstřikováním nylonu na lisech. Na druhou stranu je možné ozubené kolo kdykoliv nahradit novým, vyrobeným za hodinku 3D tiskem. Pro výrobu plastového převodu jsme využili PET-G. Tisk z nylonu jsme nakonec vypustili z důvodu nutnosti precizního vysušení tiskového materiálu před vlastním tiskem a kupovat drahý materiál na pár ozubených koleček nám přišlo neekonomické. Převodovka má aktuálně za sebou několik desítek hodin bezproblémového provozu.
Řízení, mikropočítače a elektronika integrovaná ve 3D
Řadu let byl 3D digitální prototyp považován za primární nástroj pro konstrukční řešení mechanických částí projektů. Pravdou je, že pro návrh obvodových schémat a zapojení je 2D technologie nepostradatelná. V další fázi projektování se ovšem dostáváme do situace, kdy se nevyhneme zástavbě elektronických systémů do konstrukčního celku výrobku a zde je již aplikace čistě 2D postupů zdrojem komplikací. Z technické historie je známo i několik zásadních případů, které způsobily dokonce kolaps náročných projektů právě z důvodu nevhodné integrace čistě 2D konstrukčních postupů. I v našem školním projektu jsme se proto snažili přiblížit moderní postupy oborové 2D/3D integrace našim studentům přímo na zpracování našeho digitálního prototypu.
Do modelu jsme kromě pohonného systému, střídavého regulátoru a 3s 18650 Li-Ion akumulátoru s balančním nabíjením, vestavěli několik dalších elektronických a počítačových prvků. Model je řízen v původním prototypu vysokofrekvenčním 2,4 GHz přenosem s využitím modelářského vysílače. Alternativně lze pro studentské modifikace využít ovládání mikropočítačem Arduino a mobilním telefonem. Jedná se o levnější a dostupné řešení řízení modelu i když není zdaleka tak komfortní jako speciální ergonomicky zpracovaný RC vysílač.
")
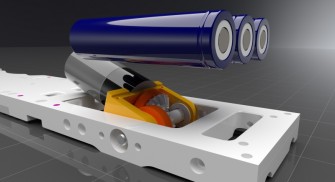
Řešení vnitřní dispozice elektroniky modelu s využitím 3D digitálního prototypu
Řídící jednotkou modelu je mikropočítač, který se stará hned o řešení několika technických problémů. Primárně propojuje mikropočítač a regulaci otáček motoru s efektovým generátorem. Pohod modelu díky tomu dostává výraz skutečného automobilu s odpovídající akcelerací a zvukovými efekty brzd, řazení a náběhem otáček motoru. Dalším úkolem mikropočítače je sladit řízení modelu se světelnou signalizací směrových a hlavních světel s možností integrace základů autonomního řízení na základě vstupních senzorů.
My jsme experimentálně dále vyzkoušeli směrový gyroskop a FPV kamerový systém. Systém byl pracovně navázán na tablet pomocí bluetooth modulu pro snadnou konfiguraci jeho parametrů. Stejně jako u „dospělých“ automobilů a jiných, nejen dopravních prostředků, je podíl elektronických a počítačových systémů stále vyšší. Podívejme se například na dron, který by bez složitých mikropočítačů zajišťujících stabilizaci opravdu nelétal.
")
Zástavba komponent pohodu, mikropočítače a elektroniky do modelu
Ladíme druhý model s levnější elektronikou
Nasbírané zkušenosti z konstrukce a výroby prvního prototypu jsou vždy cenným zdrojem informací, které je nutné v technické praxi zpětně vyhodnotit a aplikovat. Ještě bude chvíli trvat, než vyrobíme první ověřovací sérii. Nyní nastává vhodný čas posbírat z realizace prvního prototypu „to nejlepší“ a pokusit se vyrobit další kus. My jsme využili na škole pro tento úkol závěr školního roku, kdy hledají naši studenti vhodná témata pro své maturitní projekty a zadali jsme projekt levnější verze digitalizace našeho automobilu. V původním prototypu bylo využito jednoúčelového mikropočítače, nový model by měl být řízen oblíbeným univerzálním mikropočítačem Arduino.
")
Konstrukční návrh druhé varianty modelu
Při zpracování druhého automobilu jsme navíc měli možnost studentům ukázat jak se s využitím unifikovaných postupů a 3D projektování razantně zkrátí časové nároky potřebné pro modifikaci jednotlivých konstrukčních uzlů. V této oblasti se optimalizované postupy parametrického a adaptivního modelování v sestavách ukazují jako nepřekonatelný pomocník. Technicky byl kompletně přepracován vnitřek automobilu při zachování zcela identických vnějších tvarů a rozměrů. Ve vnějším designu modelu jsme odbočili pouze od naší školní červené k žluto-oranžové. Pro vyladění finálního designu automobilu jsme využili opět postupů virtuální reality ve spojení s průmyslovou vizualizací.
")
Hotové modely
Další díl našeho seriálu věnujeme některým zajímavým technologickým optimalizacím, které nám zefektivní výrobu menší série. Pro informace o dalších zajímavých projektech můžete zavítat na naše školní stránky www.spszr.cz, případně na náš Facebook.