
Koncepce tohoto modelu vznikla na pracovišti katedry aplikované mechaniky a mechatroniky Strojnické fakulty Technické univerzity v Košicích. Návrhem prototypu a dalšími modifikacemi se zabývají studenti v rámci bakalářských a diplomových prací pod vedením zkušených pedagogů. Tento robot je zároveň didaktickým modelem, na kterém se studenti studijních programů Mechatronika a Všeobecné strojírenství učí navrhovat a řešit konkrétní technické problémy. Vše samozřejmě za podpory CAD systémů, které stojí na počátku návrhu, následného posuzování funkčnosti navrhovaného zařízení a technické přípravě výroby.
Vývoj podvozků robota
Na samém počátku byly nejprve experimenty s tuhým podvozkem, přičemž každé kolo mělo svůj vlastní akční člen. Tato myšlenka diferenčního pohonu kol znamená to, že nejsou potřebné mechanické převody pro řízení směru jízdy a diferenciál. Od této myšlenky byl jen malý krok k tomu, aby studenti sestrojili první experimentální model takového vozidla. Sada závaží jim pak stačila na to, aby jej dokonale vyzkoušeli (obr. 1).
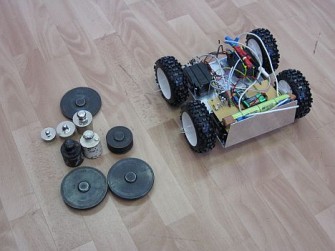
Obr. 1 Experimentální model čtyřkolového podvozku
Jak se ukázalo po prvních testech, výraznou slabinou tohoto modelu byly průjezdy překážkami. To bylo motivujícím faktorem změny koncepce podvozku. V rámci diplomové práce [1] vznikl v prostředí Solid Edge návrh podvozku robota s podélně dělenou koncepcí. Rám podvozku byl tedy ze dvou dílů spojených kloubem, který dovoluje oběma dílům rámu libovolně se naklápět v závislosti na složitosti terénu. Nosný rám (obr. 2) tvoří základ celé konstrukce podvozku robota. Jsou v něm uloženy a upevněny všechny ostatní konstrukční prvky a moduly, jako jsou ložiskové domečky, servomotory, řemenové převody, řídící elektronika a všechny ostatní části.
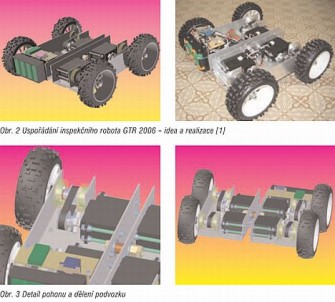
Otáčení všech kol je samostatně řízené a to umožňuje podvozku otočit se na místě s nulovým poloměrem otáčení (podobně jako vojenský tank). Změna směru jízdy se realizuje pomocí rozdílných otáček levých a pravých kol. Jde o tzv. diferenční řízení kol, které se používá i při řízení pásových vozidel [1].
Zdrojem točivého momentu jsou čtyři nezávislé servomotory, což s sebou přináší řadu výhod. Podvozek robota tedy může pohonnou sílu plně automaticky přenášet z přední nápravy na zadní a naopak. Díky možnosti variabilní distribuce hnací síly mezi koly disponuje podvozek robota za každých okolností nejlepší možnou trakční silou. V případě, kdy se jedna z náprav dostane na kluzký povrch, je možné přesunout hnací sílu na tu nápravu, kde kola jsou na povrchu s lepší přilnavostí. Tímto způsobem podvozek robota nejenže dosahuje optimální jízdní vlastnosti, ale umožňuje i hospodárné využívání svých energetických zdrojů. Nemluvě o schopnosti zdolávání terénních překážek, čemuž kromě sofistifikovaného řešení pohonu podvozku silně napomáhají i široké pneumatiky z měkké přilnavé gumy s terénním dezénem, což zajišťuje dobrou adhezi k povrchu terénu.
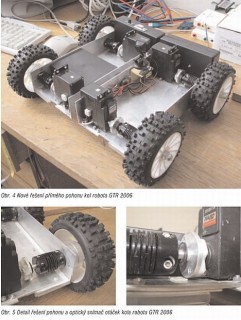
Tento návrh podvozku byl následně proveden (obr. 2) a testován studenty i v exteriéru. Již první testy ukázaly slabiny tohoto návrhu. Jedním z problémů byl nesprávně zvolený řemenový převod na přenos točivého momentu z pohonů na kola. Umístění pohonů a tyto řemenové převody zabíraly značnou část objemu podvozku. V rámci dalších prací studentů byla navržena a zrealizována myšlenka přímého připojení pohonu ke kolům pomocí pružných spojek. Po těchto modifikacích byly realizovány další úpravy prototypu podvozku robota GTR2006 (obr. 4, 5). Po zmíněných úpravách „shodil" pár stovek gramů a disponuje mnohem větším prostorem pro plánovaný manipulátor a polohovací kamerový systém [2, 3].
Akční členy a senzorové vybavení robota
Jako zdroj točivého momentu pro kola byl zvolen servomotor HS 805BB právě pro vysoký dosažitelný točivý moment vzhledem k jeho rozměrům a hmotnosti. Dalším důvodem byla jednoduchost jeho ovládání. Servomotor je složen ze stejnosměrného motoru, převodovky a řídící elektroniky. Sériově vyráběný servomotor však umožňuje rozsah pohybu jen v intervalu ± 90°. Pro jeho použití v podvozku robota GTR 2006 ho bylo nutno upravit do režimu kontinuální rotace. Na servomotor byl umístěn trimr (nastavovací prvek) pro nastavení referenčního stavu, ve kterém se výstupní hřídel servomotoru neotáčí. Během testování se vyskytl problém se vzájemným rušením při buzení servomotorů. Z tohoto důvodu byly na svorky stejnosměrného elektromotoru (uvnitř servomotoru) umístěny odrušovací kondenzátory pro zamezení jiskření na komutátoru stejnosměrného elektromotoru. Standardní kabel pro ovládání otáček servopohonu byl vyměněn za stíněný kabel.
Robot je vybaven čidly otáček všech kol. Pro tento účel byly vybrány optické snímače a vysílače pracující v infračerveném spektru, přičemž tok světla mezi nimi je pravidelně přerušovaný kotoučem s pravidelně rozmístěnými drážkami po obvodu. Tento snímací systém je používán také v počítačových myších pracujících na principu odvalování koule [2].
Protože přesně neznáme, v jakém pracovním prostředí bude robot operovat, počítá plánovaná koncepce robota i s určitým stupněm inteligence. Celkem užitečnou funkcí je snímání a vyhýbání se překážkám. Pro tento účel studenti testovali několik typů snímačů, které budou schopny poskytnout řídící jednotce robota důležité informace, aby se robot včas vyhnul blížící se překážce.
Řízení pohybu robota
Robot je dálkově ovládán pomocí kabelů (na krátkou vzdálenost) nebo bezdrátově pomocí vysokofrekvenčního vysílače a přijímače do vzdálenosti 150 m. Navigace pro operátora je umožněna pomocí bezdrátové kamery s vysílačem a přijímačem [1].
Pro účely řízení byl zvolen jednočipový mikropočítač BasicStamp 2 (BS2). Snadná manipulace s ním a jednoduché programování byly hlavními důvody tohoto výběru.
Plošný spoj robota je řešen modulárně tak, aby bylo možné vytvářet různé modifikace zapojení bez výrazných zásahů do plošného spoje. Studenti tak mohou experimentovat a vyzkoušet si různá zapojení a připojit bez problémů další snímače a akční členy. Elektronický modul obsahuje i několik ochranných prvků, aby při nesprávném zapojení nedošlo k poškození citlivých prvků, a to hlavně mikropočítače.
Zdrojem energie je šest kusů akumulátorů NiMH 1,2 V 3500 mAh, typ HR 14. Předpokládaný dojezd vozidla s těmito akumulátory je přibližně 1 hodinu, přičemž v navrhované koncepci se počítá i se záložním náhradním zdrojem energie, automaticky nabíjeným solárním modulem.

Zhodnocení
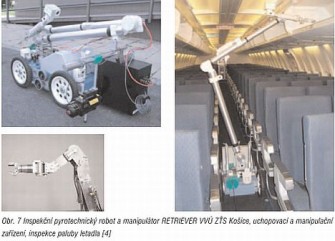
Robot GTR 2006 bude disponovat víceprocesorovou strukturou, která na sebe převezme část operací nezbytných pro chod, stabilitu, vyhýbání se kolizím, autonomní energetickou strategii a další. Robot po svém dokončení bude představovat částečně inteligentní systém, který bude možno flexibilně přizpůsobit konkrétní situaci. V současném stavu je robot nosičem průzkumné kamery. Počítá se však i s manipulačním zařízením, jak to je znázorněno na příkladu z praxe, viz obr. 7 [4]. Na jeho návrhu, realizaci a kontinuálním zdokonalování se podílejí i studenti, kteří se tímto způsobem připravují na řešení konkrétních problémových úloh v praxi.
Článek byl vypracován s podporou projektu VEGA 1/0201/08 „Výskum štruktúr a správania sa modulov mechatronickej mobilnej technickej sústavy na úrovni orgánov a stavebných prvkov za účelom zlepšenia vlastnosti mobilnej technickej sústavy" a VEGA 1/0464/09 „Výskum mechatronických sústav imitujúcich lokomóciu hada v obmedzenom a premenlivom priestore.
Literatura
[1] KÖNIG, R.: Návrh didaktického modelu vozidla s ovládaním všetkých kolies, DP, vedúci DP: doc. Ing. Michal Kelemen, PhD., TU, SjF, KAMaM, Košice, 2006.
[2] CETNER, R.: Mobilný inšpekčný robot, DP, TU, SjF, KAMaM, vedúci DP: doc. Ing. Michal Kelemen, PhD., Košice 2009.
[3] BALÁŽ, R.: Návrh manipulačného zariadenia pre mobilný robot, DP, SjF, KAMaM, vedúci DP: doc. Ing. Michal Kelemen, PhD., Košice 2008.
[4] HOLCER, R.: RETRIEVER – mobilný teleoperátor na vyhľadávanie, manipuláciu a prieskum podozrivých predmetov, ZTS VVÚ KOŠICE a. s., AT&P journal 2/2008,