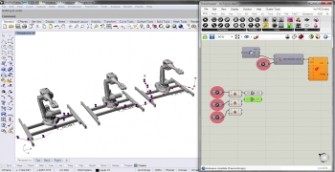
Taco je bezplatný doplněk pro simulaci a ovládání průmyslových ABB robotů přímo z prostředí Grasshopper. Taco umožňuje programovat roboty a zobrazit si parametriku. Hlavními funkcemi pluginu jsou možnosti požadavků pro jednotlivé i pro více robotů (ABB Multi-Move), I.K Solver a generátor kódu RAPID, kalibrace čtení IRC5 s možností uploadu, nastavení vlastních parametrů nástrojů a vlastních rychlostí, definice ABB_IRB2600_20165, simulace robota, detekce kolizí, kontrola rozsahu os či kontrola singularity.
Taco je vyvíjen na univerzitě v Innsbrucku ve spolupráci s laboratoří Media x Design Lab (CH), a je dílem tří vývojářů (Shih-Yuan Wang, Yu-Ting Sheng a Florian Frank). Doplněk je možné stáhnout zde.
Využití doplňku Taco je na vlastní nebezpečí, protože jde o bezplatný software. Vývojáři nenesou žádnou odpovědnost za škody nebo zranění! Zkontrolujte pečlivě RAPID kód před jeho uploadem.
Podívejte se na následující video: